Release Notes
PlantPAx Process Library with Application Templates, Application Code Manager Library, Tools & Utilities, and Integration with Endress+Hauser Devices
Version 5.00.00 (released 10/2020)
Catalog Number Process Library
Requirements
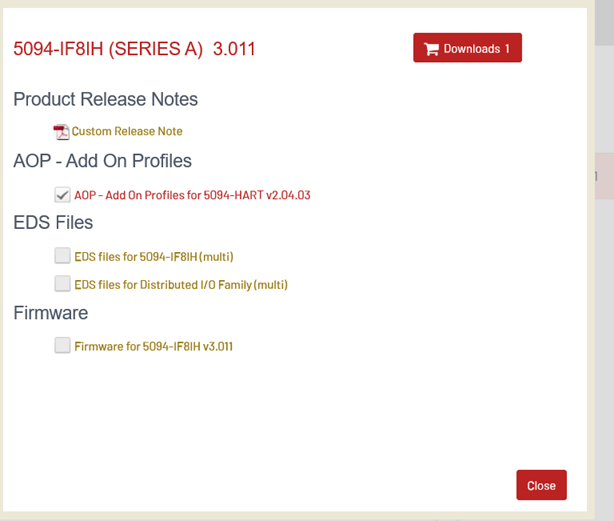
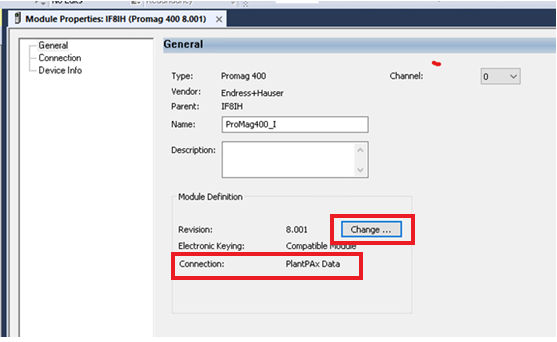
This release has the following requirements.
- Install AOP version 2.04.03 or later
- Use the PlantPAx data type
Library Specific Compatibility - Software Requirements:
- Studio 5000 Logix Designer, version 33
- Studio 5000 Application Code Manager, version 4.01
- FactoryTalk View Site Edition, version 12
- FactoryTalk Historian, version 7
Library Specific Compatibility - Hardware Requirements:
- ControlLogix Process Controllers: 1756-L81EP, 1756-L83EP, 1756-L85EP, 1756-L81EPXT, 1756-L83EPXT, 1756-L85EPXT
- CompactLogix Process Controllers: 5069-L320ERP, 5069-L340ERP
- *.L5X file names containing the suffix _NPDT (Native Predefined Data Types) contain instruction versions that utilize predefined data structures available in v33 and later for 5580 and 5380 ControlLogix programmable logic controllers.
- *.L5X file names NOT containing the suffix _NPDT contain instruction versions that utilize user-defined data structures and can be used in all ControlLogix programmable logic controllers v30 and later.
Features
This release includes the following system features.
- ControlLogix process controller: 1756-L81EP, 1756-L83EP, 1756-L85EP
- CompactLogix process controllers: 5069-L320ERP, 5069-L340ERP
|
PlantPAx Instruction
|
Previous
Process Library
AOIs
|
Instruction Description
|
|
Process Analog Input (PAI)
|
CM_AIN (GEMS)
MSAinSiS
(RAMS)
P_AIChan (PO)
P_AInAdv (PO)
P_Ain (PO)
|
The Process Analog Input (PAI)
instruction monitors an analog input and
checks for alarm conditions. Use the PAI
instruction to process a signal from a
channel of an analog input module. Use
the PAI instruction with any analog
(REAL) signal.
|
Process Dual Sensor Analog
Input (PAID)
|
P_AInDual (PO)
|
The Process Dual Sensor Analog Input
(PAID) instruction monitors one analog
Process Variable (PV) by using two
analog input signals, from sources such
as dual sensors, dual transmitters, and
dual input channels. The PAID
instruction monitors conditions of the
channels and reports configured PV
quality. The PAID instruction has
functions for input selection, averaging,
and failure detection. Additional
functions, such as for filtering and
alarming, are done by a downstream PAI
block.
|
|
Process Multi Sensor Analog
Input (PAIM)
|
P_AInMulti (PO)
|
The Process Multi Sensor Analog Input
(PAIM) instruction monitors one analog
process variable (PV) by using up to
eight analog input signals from sources
such as sensors, transmitters, and input
channels. The PAIM instruction has
functions for input selection, averaging,
and failure detection. Additional
functions, such as filtering and alarming,
are done by a downstream PAI block.
|
|
Process Discrete Input (PDI)
|
CM_DIN (GEMS)
MsDinSiS
(RAMS) P_DIn
(PO)
|
The Process Discrete Input (PDI)
instruction monitors a discrete (true or
false) input, and checks for alarm
conditions. Use the PDI instruction to
process a signal from a channel of a
discrete input module. Use the PDI
instruction with any discrete (BOOL)
signal.
|
|
Process
Pressure/Temperature
Compensated Flow (PPTC)
|
P_PTComp (PO)
|
The Pressure/Temperature
Compensated Flow (PPTC) instruction
calculates a flow at standard
temperature and pressure, essentially a
mass flow rate, given a volumetric flow
rate or differential pressure
measurement. This instruction requires
measurements of the actual temperature
and pressure of the flowing gas.
|
|
Process Tank Strapping
Table (PTST)
|
P_StrapTbl (PO)
I_Chrctrztn
(GEMS)
|
The Process Tank Strapping Table
(PTST) instruction calculates the volume
of product in an upright cylindrical tank,
given the level of the product and the
tank calibration table.
|
|
Process HART (PAH) (+ PAI
or PAO)
|
P_AInHART
P_AOutHART
|
The Process Analog HART (PAH)
instruction is used to provide HART
digital data for an intelligent analog
device alongside the analog input (PAI)
or analog output (PAO) instruction for
that device.
|
|
PlantPAx Instruction
|
Previous
Process
Library AOIs
|
Instruction Description
|
|
Process Analog Output
(PAO)
|
CM_AOUT
(GEMS)
MSAoSoS
(RAMS)
P_AOut (PO)
P_ValveC (PO)
|
The Process Analog Output (PAO)
instruction drives an analog output and
checks for alarm conditions. Use the PAO
instruction for a channel of an analog output
module. Use the PAO instruction with any
analog (REAL) signal.
|
|
Process Discrete Output
(PDO)
|
CM_DOUT
(GEMS)
P_DOut (PO)
|
The Process Discrete Output (PDO)
instruction drives a discrete (true / false)
output, monitors discrete inputs serving as
feedbacks from a device driven by the
discrete output, and checks for alarm
conditions. Use the PDO instruction for a
channel of a discrete output module. Use
the PDO instruction with any discrete
(BOOL) signal.
|
Process Motor (Power
Discrete) (PMTR)
|
CM_M2S
(GEMS)
MsMtrFrS
(RAMS)
P_Motor2Spd
(PO)
P_MotorHO
(PO)
P_MotorRev
(PO) P_Motor
(PO) P_SMC50
(PO)
P_SMCFlex
(PO)
|
The Process Motor (PMTR) instruction
monitors and controls a fixed single-speed,
two- speed, or reversing motor using a
full-voltage contactor or intelligent motor
controller (soft starter). The motor can be
run or jogged, including jogging reverse or
jogging fast, as configured by the user. The
interface to the hardware motor controller
can be through a Device Object Interface or
through individual pins. The object is a
configurable, built-in combination of the
existing PlantPAx P_Motor (single speed),
P_Motor2Spd (two speed), P_MotorRev
(reversing), and P_MotorHO
(hand-operated or monitor-only) Add-on
instructions in the Rockwell Automation
Library of Process Objects.
|
Process Valve Library
(PVLV)
|
CM_V2S
(GEMS)
CM_V3S
(GEMS)
MsVlv2sS
(RAMS)
MsVlv3S
(RAMS)
P_ValveHO
(PO)
P_ValveMO
(PO)
P_ValveSO
(PO)
|
The Process Valve (PVLV) instruction
operates a two-position, single-solenoid
operated valve, a dual-solenoid operated
valve, or a motor-operated valve in various
modes, monitoring for fault conditions. It
also monitors hand-operated two-position
valves. It is a built-in analogy of the existing
PlantPAx P_ValveSO, P_ValveMO, and
P_ValveHO add-on instructions in the
Rockwell Automation Library of Process
Objects.
|
Process VSD (Power
Velocity) (PVSD)
|
CM_VFD
(GEMS)
MsVsdFrs
(RAMS)
P_PF52x (PO)
P_PF6000 (PO)
P_PF7000 (PO)
P_PF753 (PO)
P_PF755 (PO)
P_VSD (PO)
|
The Process Variable Speed Drive (PVSD)
instruction monitors and controls a variable
speed motor using an AC (variable
frequency) or DC drive. Use the instruction
to run or jog the motor, forward or reverse.
The drive interface can be through a Device
Object Interface or through individual pins.
The object is a built-in version of the
existing P_VSD add-on instruction in the
Rockwell Automation Library of Process
Objects.
|
|
PlantPAx Instruction
|
Previous
Process Library
AOIs
|
Instruction Description
|
|
Process Boolean Logic
(PBL)
|
P_Logic (PO)
|
The Process Boolean Logic with
Snapshot (PBL) instruction executes up to
eight gates of configurable Boolean logic.
Gate types available include AND, OR,
XOR (Exclusive-OR), Set/Reset, Select,
and Majority. Each gate provides up to
four input conditions that are individually
invertible using a configuration setting.
|
Process Interlock (PINTLK)
|
P_Intlk (PO)
P_IntlkAdv (PO)
I_Multiplex_04
(GEMS)
I_Multiplex_08
(GEMS)
I_Multiplex_16
(GEMS)
I_Multiplex_32
(GEMS)
I_Protective
(GEMS)
|
The Process Interlocks (PINTLK)
instruction collects, or sums up, the
interlock conditions that stop or
de-energize a running or energized piece
of equipment. This instruction can also
help prevent equipment from starting or
being energized. Interlocks are always
evaluated to de-energize equipment. For
permissive conditions that must be made
to start the equipment, but are ignored
once the equipment is running, use the
Process Permissive (PPERM) instruction.
|
Process Lead/Lag/Standby
Motor Group (PLLS)
|
P_LLS (PO)
MsGrpM8S
(RAMS)
|
The Process Lead Lag Standby Motor
Group (PLLS) instruction provides control
of a parallel group of motors, such as a
set of pumps with a common intake
source and discharge destination. The
number of motors to run depends on the
demand on the system. The group can be
configured to consist of as few as two or
as many as 30 motors. The minimum
demand can be set as low as 0, so that all
motors are stopped at minimum demand.
The maximum demand can be set as high
as the number of motors in the group.
|
|
ProcessPermissive
(PPERM)
|
P_Perm (PO)
I_Multiplex_04
(GEMS)
I_Multiplex_08
(GEMS)
I_Multiplex_16
(GEMS)
I_Multiplex_32
(GEMS)
|
The Process Permissives (PPERM)
instruction collects, or sums up, the
permissive conditions that allow a piece of
equipment to energize. In most cases,
permissive conditions must be true to
energize equipment. Once the equipment
is energized, permissives are ignored.
|
Process Restart Inhibit
(PRI)
|
P_ResInh (PO)
|
Use the Process Restart Inhibit instruction
for Large Motor (PRI) instruction to
prevent large motors from starting
repeatedly. The high starting current for a
large motor causes heating. Continual
starts or start attempts in a short period
overheat the motor windings and damage
the motor.
The PRI instruction provides a rule-based
state model for restarts. Do not use the
instruction to model or monitor heating
and replace sensor-based motor
monitoring devices. Use the instruction to
avoid over stressing a motor.
|
|
Process Run Time (PRT)
|
P_RunTime (PO)
|
The Process Run Time and Start Counter
(PRT) instruction records the total run
time and number of instances the motor or
other equipment starts. The PRT is a
software implementation of the
mechanical hour meter that displays the
total motor runtime.
Maintenance personnel use the run time
and equipment start variables to create a
maintenance schedule for the applicable
equipment.
|
|
Process Valve Stat
(PVLVS)
|
P_ValveStats
(PO)
|
The Process Valve Statistics Object
(PVLVS) instruction monitors a two-state
(open and close) valve and records
statistics for stroke times and stroke
counts to aid in planning maintenance or
diagnosing valve and actuator problems.
The PVLVS instruction is designed to
work with the PVLV (solenoid, motor, and
hand operated) valve instruction.
|
|
PlantPAx Instruction
|
Previous
Process
Library AOIs
|
Instruction Description
|
|
Process Command Source
(PCMDSRC)
|
P_CmdSrc
(PO)
|
The Process Command Source
(PCMDSRC) instruction selects the
command source for a device.
|
|
PlantPAx Instruction
|
Previous
Process
Library AOIs
|
Instruction Description
|
Process Dosing (PDOSE)
|
CM_TOT
(GEMS)
CM_WS
(GEMS)
MsTotSiS
(RAMS)
P_DoseFM
(PO)
P_DoseWS
(PO)
|
The Process Dosing (PDOSE) instruction
controls an ingredient addition that uses a
flow meter to measure the quantity of
ingredient added. The flow meter can be an
analog flow meter (signal proportional to
flow), a pulse generating flow meter (pulse
count proportional to quantity delivered), or
a digital flow meter providing flow rate or
quantity (totalized flow) information. The
instruction also controls an ingredient
addition that uses a weigh scale to measure
the quantity of ingredient added. The weigh
scale can be on the receiving vessel,
indicating gain in weight, or on the sourcing
vessel, indicating loss in weight. The weigh
scale can be connected using an analog
input, device network, or other connection.
|
|
PlantPAx Instruction
|
Previous
Process
Library AOIs
|
Instruction Description
|
Process Deadband
Controller (PDBC)
|
P_DBC
|
The Process Deadband Controller (PDBC)
provides:
|
|
Process Analog Fanout
(PFO)
|
P_Fanout (PO)
|
The Analog Fanout (PFO) instruction sends
one primary analog output signal to multiple
secondary users or devices. Each
secondary output has configurable gain,
offset, and clamping limits.
|
|
Process High or Low
Selector (PHLS)
|
P_HiLoSel (PO)
|
The Process High or Low Selector (PHLS)
instruction selects the highest or the lowest
of up to six incoming controlled variables
(CVs). The instruction sends the selected
CV as output and flags the unselected CVs
to track the selected CV.
|
Process Regulatory
Control (PPID)
|
CM_PIDE
(GEMS)
CM_PID
(GEMS)
MSPidBaS
(RAMS)
MsPidEns
(RAMS)
P_PIDE (PO)
|
Use the Process Proportional + Integral +
Derivative (PPID) instruction to manipulate
the Control Variable (CV) in regulatory
control loops in response to Process
Variable (PV) readings and Setpoint (SP,
the target PV) settings.
The CV is typically used as a cascade
setpoint for a secondary, or inner, control
loop or is sent to an Analog Output channel
on an IO card.
The PPID instruction integrates functions of
the existing PID, PIDE, and P_PIDE AOI
into a single built-in instruction and adds
additional features.
|
PlantPAx 5.0 Add-On Instructions in relation to previous releases of PlantPAx Add-On Instructions.
Input Control
|
PlantPAx 5.0 AOIs Bundled with
5.0 Library Download
|
Previous Process
Library AOI(s)
|
Description
|
|
raP_Tec_HARTChanData_to_PAH
|
new
|
Transfers data from one Library
4.10 HART module Channel Data array member (for one input or output channel) to one (Highly-Integrated HART) PAX_HART_DEVICE:I:0 data structure for use by PAH instruction. |
|
raP_Tec_LgxEvent
|
new
|
Captures any of 16 event bit
rising edge transitions and
records the lowest-order rising
edge bit as the reason for the
event.
|
Device Control
|
PlantPAx 5.0 AOIs Bundled with
5.0 Library Download
|
Previous Process
Library AOI(s)
|
Description
|
|
raP_Dvc_nPos
|
P_nPos (PO)
|
Controls a circular or linear
discrete device with up to 30
positions. The instruction
provides outputs to select an
individual position and outputs
to move toward increasing
positions (‘clockwise’ for a
circular device) or decreasing
positions (‘counterclockwise’
for a circular device).
|
raP_Dvc_D4SD
|
P_D4SD (PO)
|
Controls and monitors
feedback from a discrete
2-state, 3- state, or 4-state
device s, monitoring for fault
conditions. These devices
include multiple-speed motors
or multiple position valves.
Controls four discrete outputs
and monitors four discrete
feedback inputs. Each output
and input has configurable
states of each output in the
various device states.
The instruction also monitors
permissive and interlock
conditions; the latter returns
the device to its default state.
|
|
raP_Dvc_VlvMP
|
P_ValveMP (PO)
CM_VMX (GEMS)
|
Controls one mix-proof valve
in a variety of modes and
states, and can check position
feedback inputs to verify that
the valve reached the
commanded position. An
alarm can be provided on
failure to reach a target
position.
|
|
PlantPAx 5.0 AOIs
Bundled with 5.0 Library
Download
|
Previous
Process Library
AOI(s)
|
Description
|
| Logix Change Detector
(raP_Dvc_LgxChangeDet)
|
L_ChangeDet
(PO)
|
Monitors another Logix controller on the
network and checks for changes that
impact operation. Changes that can be
monitored include downloads, online edits,
I/O forcing , and controller mode changes.
|
|
Logix Controller CPU
Utilization
(raP_Dvc_LgxCPU_5x80)
|
L_CPU_5x80
(PO) (v33)
|
Monitors a Logix controller, and provides
information on controller CPU utilization,
communication usage, memory usage,
task scan times, and other information.
Data that is provided by the L_CPU
instruction is useful to diagnose
communication or control responsiveness
issues and in tuning the performance of
control tasks for optimum controller
performance.The raC_Dvc_LgxCPU_5x80
instruction can be loaded as part of a
control application and disabled (default)
until needed. The instruction can also be
enabled at a slow update rate for general
controller monitoring. The update rate can
be increased, if necessary, as directed by
a Rockwell Automation Technical Support
representative to help diagnose controller
performance issues.
|
|
Logix Module Status
(raP_Dvc_LgxModuleSts)
|
L_ModuleSts
(PO)
|
Monitors the connection status of one
module in the I/O configuration tree of the
Logix controller. The instruction provides
an I/O fault signal if the connection is not
‘running’.
|
|
Logix Redundant Controller
Monitor
(raP_Dvc_LgxRedun)
|
L_Redun (PO)
|
Monitors one redundant pair of Logix
controllers. The instruction checks primary
and secondary controller status that can
affect the ability of the system to switch to
the back-up controller on a failure of the
primary.
|
| Logix Task Monitor
(raP_Dvc_LgxTaskMon)
|
L_TaskMon (PO)
|
Monitors one task running in a Logix
controller to provide task statistics, such
as task scan time and overlap count.
The instruction also provides the following:
Maintenance commands are provided for
clearing the maximum execution time and
the overlap count.
|
Equipment Control
|
PlantPAx 5.0 AOIs Bundled with
5.0 Library Download
|
Previous Process
Library AOI(s)
|
Description
|
|
raP_Opr_Area
|
AREA (GEMS)
|
Groups Units together, and
provides a propagation
mechanism for aggregating
status from Unit objects, and
broadcasting commands to
Unit Modules.
|
|
raP_Opr_EMGen
|
EM_GEN (GEMS)
|
Controls an Equipment
Module in a variety of modes
and monitors for fault
conditions.
|
|
raP_Opr_EPGen
|
EP_GEN (GEMS)
|
Controls a Equipment Phase
in a variety of modes and
monitors for fault conditions.
|
|
raP_Tec_ParRpt
|
I_ParameterEnum
(GEMS)
I_ParameterInteger
(GEMS)
I_ParameterReal
(GEMS)
I_ParameterString
(GEMS)
|
Implements parameter and
report data items:
Equipment Module
(raP_Opr_EMGen) and
Equipment Phase
(raP_Opr_EPGen) are
designed to work with the
raP_Tec_ParRpt instruction.
|
|
raP_Opr_Unit
|
UNIT (GEMS)
|
Controls a Unit in a variety of
command sources and
monitors for fault conditions.
|
|
raP_Opr_Prompt
|
Prompt (GEMS)
P_Prompt (PO)
|
Acts as a mechanism for
operator interaction that can
be used within a control
scheme. The instruction
presents an operator with
configurable message or data
fields and accepts operator
response data and
confirmation.
|
|
Process Extended Alarms
(raP_Opr_ExtddAlm)
|
Extended Alarms
(GEMS)
|
Monitors one input condition
and provides one configurable
Alarm. The Alarm is provided as
a Logix Tag Based Alarm. Use
<InstanceTag>.@Alarms
members for access.
|
Organization
Organization is a method by which parent / child relationships can be created and modified among control objects. Organization provides a method to propagate a selected subset of commands (related to command source, alarms, etc.) from the parent down to its children or propagate the aggregate of a selected subset of status (related to command source, alarms, etc.) from the children up to the parent.
|
PlantPAx 5.0 AOIs Bundled
with 5.0 Library Download
|
Previous
Process Library
AOI(s)
|
Description
|
|
Ownership (raP_Opr_Owner)
|
Ownership,
Command and
Status
Propagation
(GEMS)
|
The Add-On Instruction Function to
allow ownership of a Bus element.
|
| Organizational View
(raP_Opr_OrgView)
|
Ownership,
Command and
Status
Propagation
(GEMS)
|
The Add-On Instruction Function to
create a tree view of the nodal
organization in FactoryTalk View.
|
| Organizational Scan
(raP_Opr_OrgScan)
|
Ownership,
Command and
Status
Propagation
(GEMS)
|
The Add-On Instruction Function to
scan and update all Bus elements
and tree nodes.
|
|
Arbitration Queue
(raP_Opr_ArbitrationQ)
|
Ownership,
Command and
Status
Propagation
(GEMS)
|
The Arbitration Queue
(raP_Opr_ArbitrationQ) Add-On
Instruction Function to add a FIFO to
each class of owner in the
ownership function.
|
The process library incorporates these features:
- Logix tag-based alarms
- Extended tag properties
- Electronic signatures and audit trail additions to HMI faceplates
Known Anomalies in This Release
This release has the following known anomalies.
|
Instruction Name
|
SAMA Diagram Animated in Property Panel
|
|
PAI
|
Animated
|
|
PAO
|
Animated
|
|
PDI
|
Animated
|
|
PDO
|
Animated
|
|
PLLS
|
No animation
|
|
PMTR
|
No animation
|
|
PPID
|
Animated
|
|
PVLV
|
No animation
|
|
PVSD
|
No animation
|
PlantPAx System Release 5.0 incorporates these software versions that will be available soon:
- FactoryTalk Batch, version 14.00.00
- Studio 5000 Application Code Manager, version 4.00.00
- FactoryTalk VantagePoint 8.20.00
- (RA-LIB)CS_PMTR_REV_E300_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PMTR_2S_E300_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PMTR_1S_E300_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PMTR_1S_SMC50_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PVSD_PF525_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PVSD_PF753_5_00-00_ROUTINE.L5X
- (RA-LIB)CS_PPID_PF755_HART_5_00-00_PROGRAM.L5X
- (RA-LIB)CS_PPID_PF755_5_00-00_PROGRAM.L5X
- (RA-LIB)CS_PVSD_PF755_5_00-00_ROUTINE.L5X
PlantPAx® Embedded Instruction PVLV - Incorrect Operation on Change of Valve Type Selection (1088575, 1090027)
|
Products
|
First Known in Version
|
Corrected in Version
|
|
Process Library, version
5.00.00
|
5.00.00
|
5.00.02 and later
|
|
ControlLogix® 5580 Process
Controllers
|
33.011
|
33.012, 34.011 and later
|
|
CompactLogix™ 5380
Process Controller
|
33.011
|
33.012, 34.011 and later
|
For the Process Valve (PVLV) instruction, output to device is incorrectly generated when valve type selection is changed among selections of solenoid operated valve, motor-operated valve, or hand operated valve. Errant outputs can also be generated when changing valve action between “normally open” and “normally closed” selections for the solenoid operated valve.
For more information, see Knowledgebase Technote PVLV outputs incorrectly energize when changing the valve type while online.
PlantPAx® Embedded Instruction PVLV - Incorrect Operation When Controller Transitions from Program to Run (1061579, 1067067)
|
Products
|
First Known in Version
|
Corrected in Version
|
|
Process Library, version
5.00.00
|
5.00.00
|
5.00.02 and later
|
|
ControlLogix® 5580 Process
Controllers
|
33.011
|
33.012, 34.011 and later
|
|
CompactLogix™ 5380
Process Controller
|
33.011
|
33.012, 34.011 and later
|
For the Process Valve (PVLV) instruction, output to device is incorrectly generated when the controller is transitioned from Program to Run status. Expected behavior is that the PVLV function should not produce any output when the valve is at rest in the selected position unless there is an operator or program command to do so.
For more information, see Knowledgebase Technote Product Notice 2021-03-002 - PlantPAx 5.0 Execution Anomaly with PVLV Instruction When Controller Transitions from Program to Run.
PlantPAx Embedded Instruction PPID - Incorrect Setpoint Tracking of Process Variable (1020144, 1065240)
CORRECTED Anomaly with Firmware Revision 33.012
Known Anomaly First Identified as of:
- Process Library, version 5.00.00
- ControlLogix® 5580 Process Controllers, firmware version 33.011
- CompactLogix™ 5380 Process Controller, firmware version 33.011
For the Process Proportional + Integral + Derivative (PPID) instruction, setpoint does not maintain the tracked process variable (when selected to do so) on a transition from Manual to Automatic mode. The setpoint instead reverts to the last command-entered value before the initial transition to Manual mode.
PlantPAx Embedded Instruction PMTR - Improper Logical Use of “Use Feedback” and “Has Feedback” Selections Within the Instruction (1061598, 1067057)
CORRECTED Anomaly with Firmware Revision 33.012
Known Anomaly First Identified as of:
- Process Library, version 5.00.00
- ControlLogix® 5580 Process Controllers, firmware version 33.011
- CompactLogix™ 5380 Process Controller, firmware version 33.011
For the Process Motor instruction (PMTR), if “has run feedback” is set to FALSE (0) and if the user selects “use run feedback” to TRUE (1), the run feedback is used, even though it “doesn’t exist” (“has” is false). Run feedback should only be used if “has run feedback” and “use run feedback” are BOTH TRUE.
PlantPAx Embedded Instruction PVSD - Instruction Does Not Disable Commands from The Referenced Power Device Object (1061593, 1067059)
CORRECTED Anomaly with Firmware Revision 33.012
Known Anomaly First Identified as of:
- Process Library, version 5.00.00
- ControlLogix® 5580 Process Controllers, firmware version 33.011
- CompactLogix™ 5380 Process Controller, firmware version 33.011
The Process Variable Speed Drive (PVSD) instruction does not set the “command inhibit” and “setting inhibit” bits in the power velocity device object’s Settings interface to inhibit the jog commands and speed reference setting from the power velocity device object’s AOI and faceplate. As a result, a jog command can be issued from the power velocity device faceplate, which interferes/conflicts with the commands/speed sent by the PVSD instruction.
PlantPAx Embedded Instruction PVSD and PMTR - Do Not Allow Subsequent Fault Resets after Initial Fault (1059991, 1202104)
CORRECTED Anomaly with Firmware Revision 33.012
Known Anomaly First Identified as of:
- Process Library, version 5.00.00
- ControlLogix® 5580 Process Controllers, firmware version 33.011
- CompactLogix™ 5380 Process Controller, firmware version 33.011
Attempting to reset fault from a raC_Dvc_xxxxx faceplate will allow for subsequent attempts to clear fault. Attempting to reset fault from a Process Variable Speed Drive (PVSD) or from the Process Motor (PMTR) faceplate will not.
PlantPAx® Embedded Instruction PVSD - Returning from Hand While Drive Is Running Results in Running Wrong Direction (1424134, 1430601)
|
Controllers
|
First Known in Firmware
Revision
|
Corrected in Firmware
Revision
|
|
ControlLogix® 5580
Process
|
33.011
|
33.015, 34.011 and later
|
|
CompactLogix™ 5380
Process
|
33.011
|
33.015, 34.011 and later
|
Transitioning the command source from “Hand” to any other command source while the drive is still running, even if decelerating when commanded to stop, results in the drive continuing to run but in the opposite direction. This action requires that the drive is configured to have reverse capability and the drive is still running while the transition from “Hand” occurs.
As a workaround to the above issue, you can add logic to issue a drive Stop in Override command source on transition from Hand to (not in Hand).
- Generic_Equipment_Phase library object creates an Equipment Phase but is missing the Phase Commands routine
- Generic_Equipment_Phase library object creates an Equipment Phase with incorrect string type for Parameters and Reports for any parameter/report of type “string”
- The declaration of the following parameters in the
Generic_Equipment_Phase library object is missing
- Cfg_AlmIssuesHold
- Cfg_IntlkIssuesHold
- Cfg_SStopIssuesHold
- The conditions on the PFL instruction inclusion are incorrect in the Generic_Equipment_Phase library object
- Any devices / objects using Interlock and Permissive navigation buttons have incorrect syntax
Known Anomalies from Previous Releases
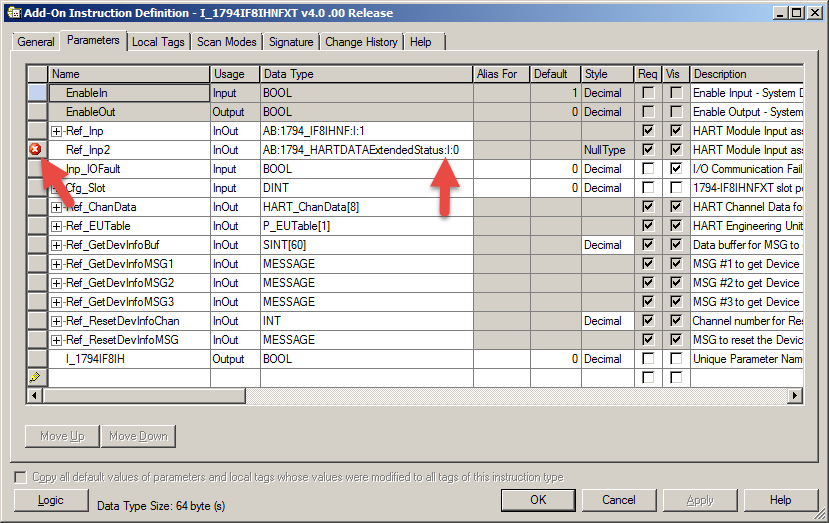
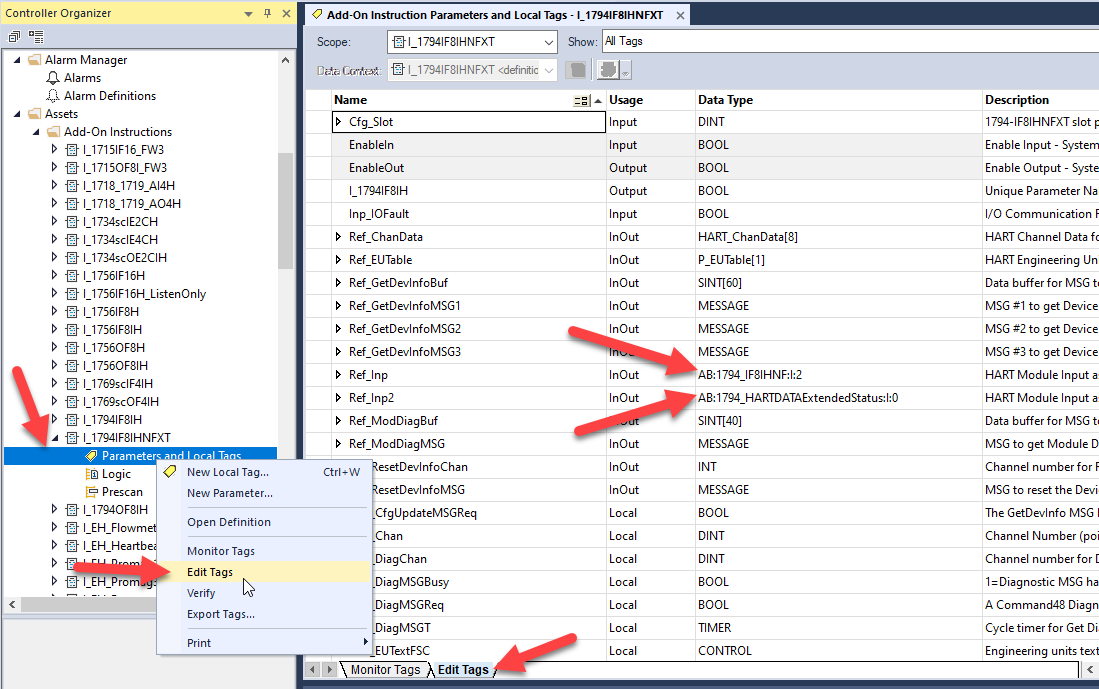
These anomalies are from previous releases but are still known in this release.
- V24 built-in profile: AB:1794_HARTDATAExtendedStatus:I:0
- V31 add-on profile: AB:1794_HARTDATAExtendedStatus:I2:0
Functional Changes
This release has the following functional changes from the previous release.
FactoryTalk View ME Support not Available in 5.xx.xx Libraries
Functional Change First Identified as of Software Version 5.00
PlantPAx 5.xx.xx libraries do not support FactoryTalk View ME.
Application Notes
This release has the following application notes.
PlantPAx Publication Library
For a current set of PlantPAx System and Process Library publications, see PlantPAx Process Solutions in the Technical Documentation Center.
You can also download previous releases of the system and library documentation sets.
Copyright © 2026 Rockwell Automation, Inc. All rights reserved.
Rockwell Automation, Allen-Bradley, and FactoryTalk are trademarks of Rockwell Automation, Inc.
To view a complete list of Rockwell Automation trademarks please click here.
Trademarks not belonging to Rockwell Automation are property of their respective companies.